6月4日上午,意大利米兰理工大学教授Hamid Reza Karimi应邀来suncitygroup太阳官网进行学术交流,并作了题为“网络环境下的滑模控制”(Sliding Model Control under Network Environment)的学术报告。报告会由王燕舞教授主持,20多位师生参加了报告会。
Hamid Reza Karimi教授是意大利米兰理工大学机械工程系的应用力学教授。他目前的研究兴趣包括应用于汽车控制系统和风能的鲁棒控制系统和机电一体化。Karimi教授目前是Journal of Cyber-Physical Systems、Journal of Machines、Journal of Designs的主编。并且是一些国际知名期刊的编辑委员会委员或主题编辑,包括IEEE Transactions on Industrial Electronics、IEEE Transactions on Circuit and Systems—I: Regular Papers、IEEE/ASME Transactions on Mechatronics、IEEE Transactions on Systems, Man, and Cybernetics: Systems、Information Sciences、IFAC-Mechatronics、Neurocomputing、Asian Journal of Control、Journal of The Franklin Institute等。他是IEEE不确定系统技术委员会、工业网络物理系统委员会、IFAC机电系统技术委员会、鲁棒控制委员会和汽车控制委员会的委员。Karimi教授是IEEE高级会员,并被授予2016年和2017年Web of Science工程领域的高被引学者。
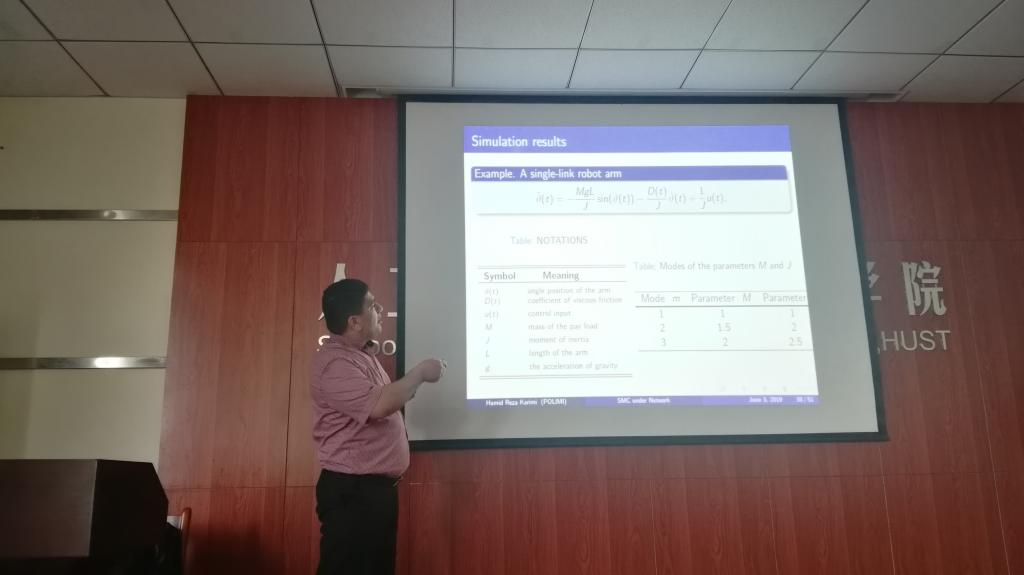
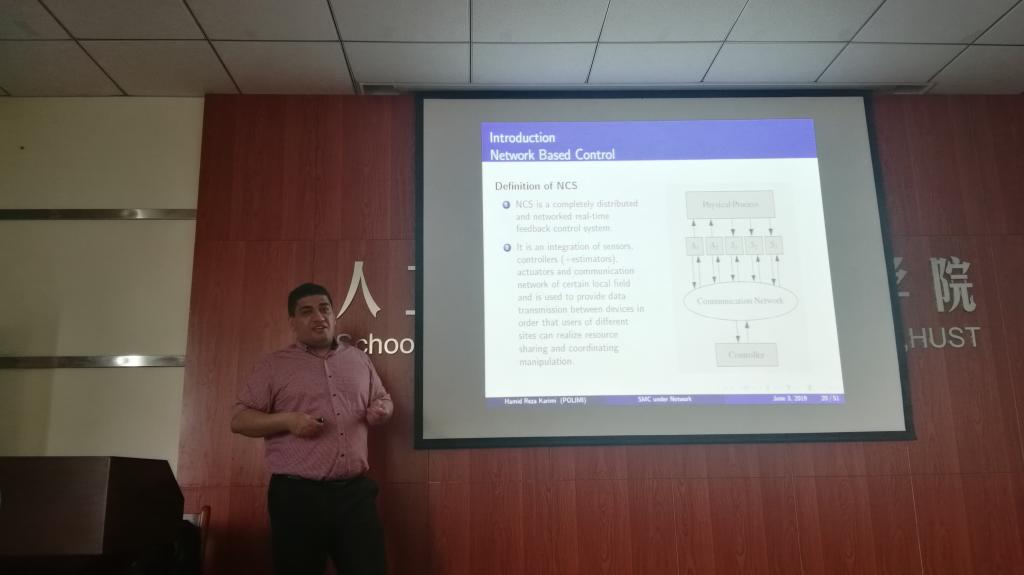
本次报告中,Karimi教授首先向大家介绍了滑模控制方法,说明其在控制邻域的广泛应用,并给出了低阶滑模控制方法和高阶滑模控制方法的对比。然后他引入了网络控制在工程上的广泛应用,并给出了滑模控制应用于网络的优势和难点。Karimi教授针对带时滞的Semi-Markovian 切换网络系统,重点介绍了模糊控制和滑模控制方法的结合,给出了控制器设计,使得系统能在有限时间达到滑模面从而完成系统任务。为了减少通信负载,Karimi教授进一步提出了事件驱动方法。最后Karimi教授向大家展示了相关的仿真实验验证了理论的可行性。
报告会后老师及同学们踊跃提问, Karimi教授一一给出了详细的解答, Karimi教授的回答给予同学们极大地启发和帮助。最后,王燕舞教授对Karimi教授的精彩报告表示感谢。

 学院公众号二维码
学院公众号二维码